
Something I have read reminded me that perhaps a lot of people don’t know what it actually does, in the common King autopilots.
It is a 2-pole switch.
One contact sends a signal to the autopilot computer telling it to disconnect (and this could fail to work if the software has crashed, etc).
The other contact (normally-closed) carries the power to all the servos.
Pressing the red button interrupts the servo power, and this is supposed to disconnect the servo clutches so you have free controls to fly the plane with.
The thing which few people know is that the power disconnection applies only while the red button is being held down. So if the servo motor/gearbox has seized up or whatever, you have to keep your finger on the red button continuously, while sorting out Plan B, and the next thing (after regaining control of the aircraft, if necessary) would be reaching for the autopilot master switch and turning it off.
There is a further slipping clutch on each servo (which must be tested on every preflight, and I know many pilots don’t do this) but this is a last-resort thing only and it would be very difficult to fly the plane while overriding this clutch.
In some failure modes, if the servo is locked steady, this feature may have another creative use: release the button to temporarily lock the yoke in its actual position and free your hands to do something else.
Are the servos in a TB20 that powerful? I can easily oversteer mine, a jammed autopilot would not be an emergency at all in my case.
It depends on where and what jams.
The little motor
is geared down something like 10,000 to 1 using the combination of its bolted-on integral gearbox and the gears in the servo, so there is no way you could drive it from the outside. You would break something before that motor would turn around. Especially as it is a crappy $10 chinese-grade motor…
If you can overpower yours, which I believe is a DFC90 and thus not applicable to the “King” topic, then the arrangement must be different, or what you are overpowering is actually a slipping clutch like the King ones have.
It is certainly possible to design a servo which doesn’t need a slipping clutch. One would have to have a much lower gear ratio, say 10:1, and then you would have to use a stepping motor It would be the best solution but AFAIK nobody in aviation has done it that way. Garmin claim to use brushless motors (which are probably 3 phase brushless ones, so still running at a high RPM) in the GFC700 but I don’t know any more.
But doesn’t the DFC90 drive the trim anyway, instead of the control surface? In the SR22 it seems to – we had some long threads here a long time ago. One is here and a long one is here
But doesn’t the DFC90 drive the trim anyway, instead of the control surface?
Both surfaces with trim being the primary (unlike more traditional systems where elevator is the primary and trim the secondary). The SR20 does not have a pitch servo, the SR22 has both.
Is there a failure mode on your installation where the AP could block a control surface? I don’t see any with the S-TEC servos, as you say there are clutches which you can easily overpower.
Is there a failure mode on your installation where the AP could block a control surface?
No; all three servos will slip – if the clutches are not seized up like they are on a large % of King AP installations because the pilot is unaware of the preflight test.
Measuring actual clutch friction is part of the maintenance of these systems. They seem neglected quite often, have found some with either a too low or too high setting. It requires quite some hours to do this properly for all servo’s.
Here we go again. Another KFC225 failure.
More general info here.
This red button switch is implicated in more than 50% of failures which indicate a completely different cause i.e. “pitch trim failure”.
Got one the other day, a few years since the last one. So, not really believing it was the switch, I changed it (because they only last a few years anyway) and it fixed it!
The funny thing is that the switch tested fine with a multimeter. Clearly it worked for the tiny current used for that but could not carry a few hundred mA or more.
I took it apart:
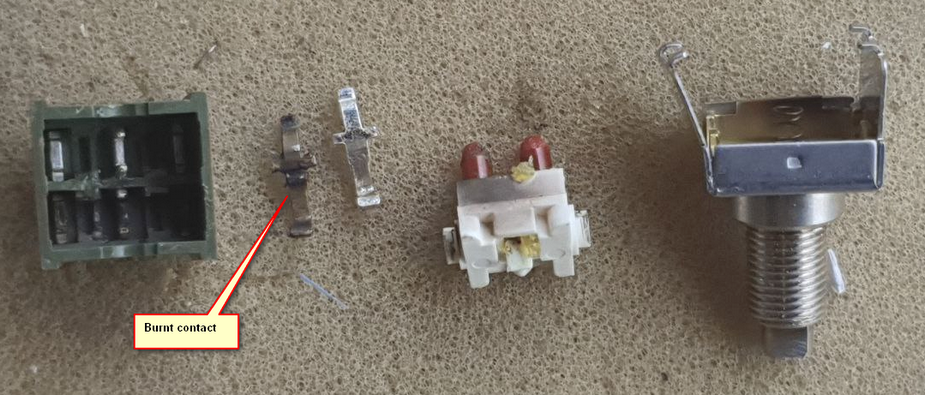
The NKK P/N is at the above link.



