
I just landed at Oostend EBOS after an ILS 26 in ghastly weather down to 200ft. During that approach, I made a mistake that I don’t fully understand.
Here’s the ILS 26:
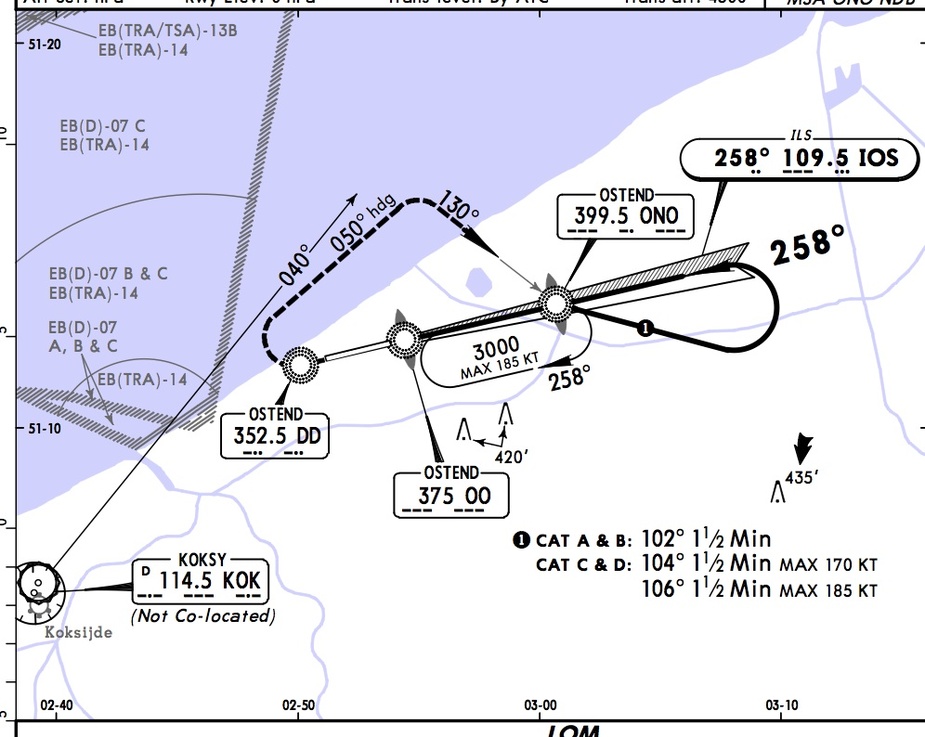
I was flying about 270° at 6000ft and cleared for the ILS (i.e. pretty far out for whatever reason). I loaded the ILS 26 with vectors to final and told the autopilot to continue on that heading until established and then follow the ILS (HDG + NAV simultaneously on the DFC90). The GNS430W was set to VLOC and the correct frequency set. I saw the ILS coming so all was fine.
When I was on the extended centerline, the airplane kept on flying straight, it even turned a bit right. I noticed it because I always watch IMC approaches on a 2nd GPS and I had it setup on a second CDI as well. The reason was that my course pointer on the HSI (Aspen) was not auto-slewed to 258° but set to something around 300° (probably from an earlier config). Now this auto-slew of the GNS430W is a nice feature but it triggers only under certain conditions and for whatever reason, it did not trigger this time. Shortly before losing the localizer, I corrected the CRS value and with a bit of manual intervention, I managed to establish on the ILS and continue down to 200ft AGL.
The question now is: why does the course pointer matter when intercepting an ILS? I was under the impression that localizers are only flown by the course deviation signal, there is no radial involved. If the localizer is to the left, the autopilot turns left, if it’s to the right, it turns right. I also remember from my IFR training spamcans that I could turn the KCS55 course pointer like I wanted, it did not matter. I can do the same with the CDI of my KX-155A, it does not influence the needles.
Is this a specialty of the DFC90 where it first wants to establish the course (radial) and then considers the course deviation signal or is there another reason? Obviously it was a stupid mistake (too much used to auto-slew) but I’d like to understand why it behaved like this. Sometimes it’s not bad to be told to intercept an ILS at 6000ft AGL 
I had exactly the same thing happen to me this spring, and did not understand it either. I thought that the plane would fly the localizer no matter where the course pointer pointed to …
After not understanding the auto-slew feature I now ALWAYS set the course manually.
After re-reading some posts on COPA i think I understand:
The auto-slew feature is ONLY a part of the GPS overlay of the ILS procedure! Therefore only if you (we) fly twds the ILS in GPS mode the auto slew will happen. The radio navigation procedure in the GNS430 in VLOC will not auto slew the course pointer, i think now.
Peter, I don’t think the back course (BC) issue applies here. The course pointer was set to 300 instead of 258, that is the same half as the correct value. It must be something else.
Auto-slew or not is not the issue here. I am trying to understand why the CRS pointer value is relevant to the AP intercepting and flying the ILS.
Where was the heading bug?
On 270° but the autopilot was already in NAV mode because it was in HDG+NAV (fly heading bug until NAV source captured) and it had switched to NAV. When in NAV mode, the heading bug should not matter on this autopilot (it did on my old Cessna Navomatic 300A where it was the wind correction).
I had something similar – the GNS430 auto-skew kept re-aligning the CRS to 2 degrees off the published Jepp plate on an ILS. All nav data is upto date, why two values?
I think this is because the autopilot uses two signals to fly the ILS – localiser deviation and course deviation. If you’re hand flying you “know” the course in your head and figure out a suitable wind deviation – doesn’t matter if the C is actually pointing where you want to go.
The simple explanation would be that the autopilot looks at the course and figures out a wind deviation. Actually, I suspect the error used in the control loop on an older analogue AP is some linear combination of course error and localiser error – course error will tend to pull you towards the autopilot course and localiser error will tend to pull you away. You could also implement it with two loops – one for a stable course error (derivative is 0) and one for absolute localiser error – this would try to “guess” the wind.
In a digital AP like the DFC90 (which AFAIK takes GPS ground track and speed, along with air data as well as course and localiser error), you can figure out a wind drift directly – then all you need to do is run your control loop around the localiser error. The problem will happen when you give it an incorrect course: it will calculate some completely whacky wind-corrected heading and send you off into la-la-land.
Does the autopilot use the course pointer to help it with calculating drift?





