
Lucius wrote:
The AFM does not say that it defaults to ROL mode when GPS signal is lost.
It does if the approach is anything other than ILS. See the sentence before the one you highlighted. But in the case of an ILS, it needs to decide between ROL and PIT, so it chooses PIT.
Peter wrote:
Discussion of a KI256 failing more often than GPS reception (which is true) is not relevant
Not sure I follow that logic. The focus of the discussion has been on the apparent “catastrophic” impact of loss of GPS position when flying the GFC500. Every pilot using should be aware of the GFC500 operational characteristics. But the focus on loss of GPS seems to me to be much exaggerated, given that the GFC500 still has a limited autopilot functionality (ROL or PIT). If the GFC500 fails less often than GPS, then it is still better than another autopilot which has a higher failure rate than GPS failure.
I think there is a tendency here to exaggerate the impact of autopilot failure (or in this case GPS failure … either device or system related) since worst case the pilot can fly the approach manually, which he/she should be able to do at any time. The autopilot is just a non-essential (albeit highly desirable) tool. There are thousands of IR pilots flying around in aircraft without autopilots.
Peter wrote:
Now you are gonna tell us that the GFC600/700, which don’t need GPS to fly an ILS, have less redundancy
It doesn’t require a GPS to be available, but we don’t know if it normally uses it or not – especially with GFC 700 as it gets data from GIA63(W), that contains both ILS & GPS receivers…
Sir_Percy wrote:
- so you actually have 2/3 GPS
If you have: G3X, G5, GTNx2, GTX with GPS
You might have 5 of those… And normally you will have G3X or G5, GTN and you possibly GTX335/345 with the right card – you already have 4.
The only challenge is the GPS signal reception.
So the questions is: what is more reliable GPS system or a single airport ILS in terms of signal reception. :)
In Europe, one needs to consider that ILS usually delivers much lower minima than even LPV, and apart from a few places LPV approaches are rare, especially ones with “appropriate” minima.
Also far more planes can fly an ILS than LPV.
You can fly the ILS coupled to the AP it just wants a gps signal as well.
I don’t think this failure stops you flying a coupled ILS under normal circumstances. And if for some reason it does go out you can use rol and pit mode to help or just hand fly the thing down. Which should not be a problem for a current instrument pilot.
chflyer wrote:
But the focus on loss of GPS seems to me to be much exaggerated, given that the GFC500 still has a limited autopilot functionality (ROL or PIT).
It should still have HDG and all the other vertical modes (ALT, VS, IAS). None of these depend on GPS.
Peter wrote:
In Europe, one needs to consider that ILS usually delivers much lower minima than even LPV, and apart from a few places LPV approaches are rare, especially ones with “appropriate” minima.
I’m not sure 50’ qualifies as “much”, and LPV approaches are generally within 50’ of the ILS minimum, whatever that might be (usually 250’ vs 200’). Quite a lot are also now the same as the ILS. LPV approaches may be rare in the UK, but contrary to popular opinion the UK situation does not represent the one across Europe.  Especially central and northern Europe normally have LPV approaches wherever there is an IAP and the posted map shows this. Especially in France most non-towered airfields with IAP have LPV today where there has never been an ILS just an NDB with higher mins.
Especially central and northern Europe normally have LPV approaches wherever there is an IAP and the posted map shows this. Especially in France most non-towered airfields with IAP have LPV today where there has never been an ILS just an NDB with higher mins.
Airborne_Again wrote:
It should still have HDG and all the other vertical modes (ALT, VS, IAS). None of these depend on GPS.
Correct, but then the autopilot is no longer coupled to GPS/VOR/ILS/LOC approach guidance.
The G5 manual shows the following:

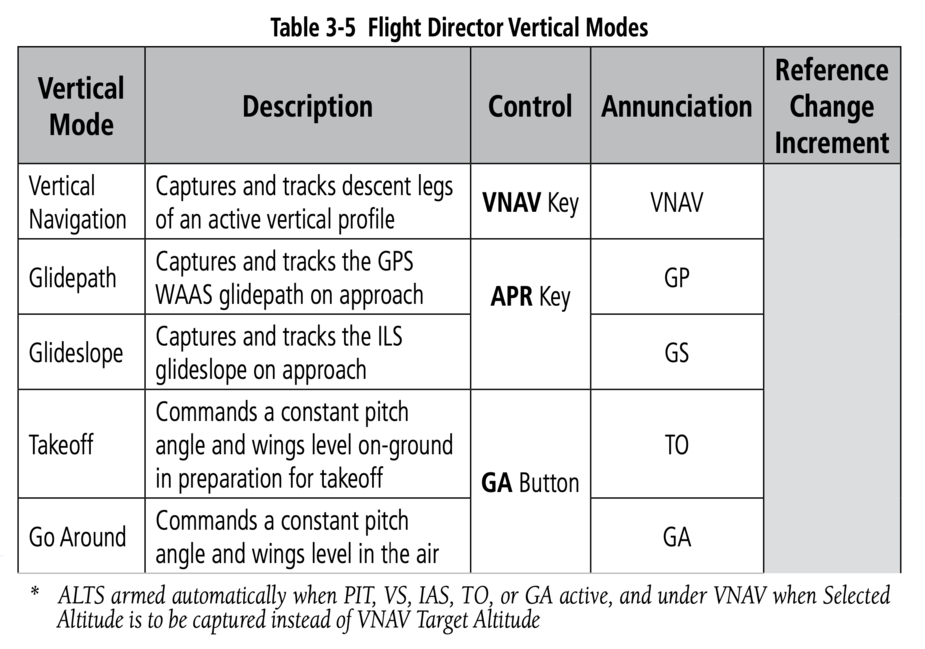
Having only an STEC-30 myself (i.e. no approach coupling), I would be interested to hear how classic autopilots react if GS is lost during an active coupled descent. The G5 manual states that if the GS is lost then the autopilot changes to PIT (i.e. pitch hold) mode at the current/last attitude. So if one is established in a descent, the G5 will maintain the descent at the last attitude which should be good to continue without GS (but of course then only to LOC minimums ).




