
Do you perhaps mean IAS?
No autopilot I know (except perhaps the Garmins??) uses GPS GS.
No “low end GA” autopilot uses IAS. The old KFC325 (a version of the KFC225 used in the TBM700) used IAS – it is necessary to optimise the control loop parameters over the wide speed range.
But some avionics shut down, partly or wholly, if IAS is lost – see e.g. here, and I don’t know what happens to an autopilot driven off that.
Peter wrote:
No “low end GA” autopilot uses IAS
The GFC500 does,
So… if your pitot freezes up, what happens to a GFC?
if the GS is lost then the autopilot changes to PIT
That would appear to be another aspect of the GFC500 needing GPS data. Does it need a GPS fix?
Peter wrote:
So… if your pitot freezes up, what happens to a GFC?
You still have GPS and magnetometer. BTW, In the very early manual of the certified G5, it was mentioned that it would still be able to display a degraded attitude solution, if both Pitot Static and GPS input fail, but good enough for continuous flight in IMC. That statement was removed in later manuals.
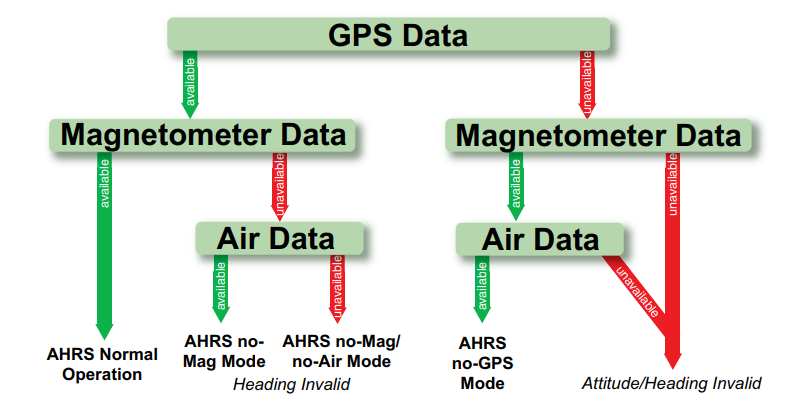
This failure mode diagram is from the G3X, which also drives the GFC 500.
Lucius wrote:
This failure mode diagram is from the G3X, which also drives the GFC 500.
The G1000 has the same diagram, but not the G5. Which stands to reason as (AFAIU) the G5 was first intended as a backup instrument for the G3X.
Peter wrote:
So… if your pitot freezes up, what happens to a GFC?if the GS is lost then the autopilot changes to PIT
That would appear to be another aspect of the GFC500 needing GPS data. Does it need a GPS fix?
Are we talking about the same thing here? My reference to GS on a coupled ILS approach meant Glideslope, not Groundspeed. The G5 has a lot of data: pitot/static, baro alt, GPS, magnetometer, AHRS. I would think that if one is autopilot coupled and established on an ILS Glideslope, if the Glideslope is lost and the autopilot switches to PIT (pitch hold) at the latest/current attitude then that should work quite well on down to the MAP.
OK; I was reading you too fast 
I understand that GPS aiding results in superior aiding when tracking an ILS compared to old analog autopilots. It is still unclear to me, why loss of GPS results in inferior aiding, compared to old analog autopilots, such that AP must be disconnected. I don’t consider this an important factor, due to all the reasons given in previous posts, but I am still curious. After all, the attitude solution is deemed good enough for continuous flight in IMC. One reason that I can think of, is that the attitude solution is slightly degraded (despite the failure diagram above stating “AHRS Normal Operation”), but still good enough for continuous flight in IMC in all flight regimes, except when approach precision is required.
From above:
It doesn’t tell us anything which we didn’t already know. It looks like Garmin don’t want to give out details. It’s like trying to extract details of the TAWS/GPWS behaviour on their handhelds; when I asked them they got quite upset and instead turned it around and asked whether my (yoke) installation was certified!




