
It’s certainly interesting to know about the limitations, however GPS outage would be a pretty significant issue that would probably lead me to try to get on the ground quickly if I was anywhere I’m not very familiar with. In which case hand flying an ILS or asking for an SRA shouldn’t be a major issue.
If this lack of redundancy is a major issue then surely a single engine is a greater concern by orders of magnitude.
There is a really basic principle in aviation that flying an ILS does not need a GPS.
Discussion of a KI256 failing more often than GPS reception (which is true) is not relevant 
The same really basic principle says that flying an ILS does _not_need an autopilot
Very true
here are two flights on the same day under the same conditions
first one is a well maintained KFC 150, second one is a GFC 500
You can see a very light oszillation with the KFC while the GFC is a perfekt straight line.
I guess the GPS aiding helps here


As the lack of knowledge about the GFC system architecture has been mentioned before, here are some aspects that might be of interest:
- the Mode Controller contains a basic AHRS that is used to check plausibility of the attitude source
- the AP Software runs in the G5 and G3X – therefore in most installations you have two AP cpmputers → redundancy
- mode annumciation is on the mode controller, the G5 and G3X → double/triple redundancy
- mode selection can be done on mode controller or G3X
- critical Data is wired via CAN and RS232 → redundancy
- GPS data is fed from the GTN/GNS
- G5 has separate GPS with antenna
- G3X has separate GPS
- so you actually have 2/3 GPS
- G3X and G5 automatically crossfeed attitude and airdata → redundant AHRS
Now you are gonna tell us that the GFC600/700, which don’t need GPS to fly an ILS, have less redundancy
critical Data is wired via CAN and RS232 → redundancy
Have Garmin actually implemented that, as implied? And what happens if one of the two links fails, and a failover takes place. There must be an annuciation, so rectification can be scheduled.
Please note that one or two GI-275 units (a “bigger brother” of the G5, of sorts) can now also drive the GFC500, and it does away with needing the GAD29. Not directly relevant to the main subject (GPS dependence) but hopefully worth mentioning.
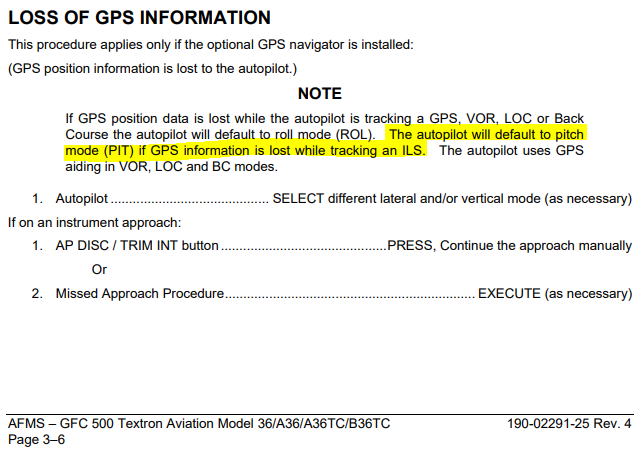
If GPS signal is lost while tracking an ILS the GFC 500 defaults to PIT mode which means that it holds the current pitch attitude. AFM states to disengage the AP and continue manually, which shouldn’t be a big deal since the plane is already tracking the proper pitch attitude and crab angle.
It would be an interesting experiment to see the exact lateral behavior. Will the GFC 500 still attempt to track the localizer and attempt to apply wind correction? The AFM does not say that it defaults to ROL mode when GPS signal is lost.
From the AFM:
Could it just be risk mitigation purely for a software error point of view? If using the GPS is so intertwined into the control loop of the software then it might it be prudent to just run in a very restricted mode without the GPS, which requires minimal testing, rather than exhaustive testing with AND without the GPS.
A very expensive European project went boom when a simple change to the operating mode of the software was made…




