
I’m trying to built my own flight leveler based on arduino for my experimental.
Maybe someone have experience with RS-232 communiaciton with trio servo?
I got protocoll description but I can’t run it. Now I’m controlling it by pwm but it’s not the best.
I have similar project ready for the next winter. Both Trio servo and Filser autopilot sit currently at my bench, I shall match the autopilot PWM with the one of Trio (double the frequency, increase voltage, widen the pulses).
Which kind of difficulties do you face with the PWM? Perhaps I shall review the plan.
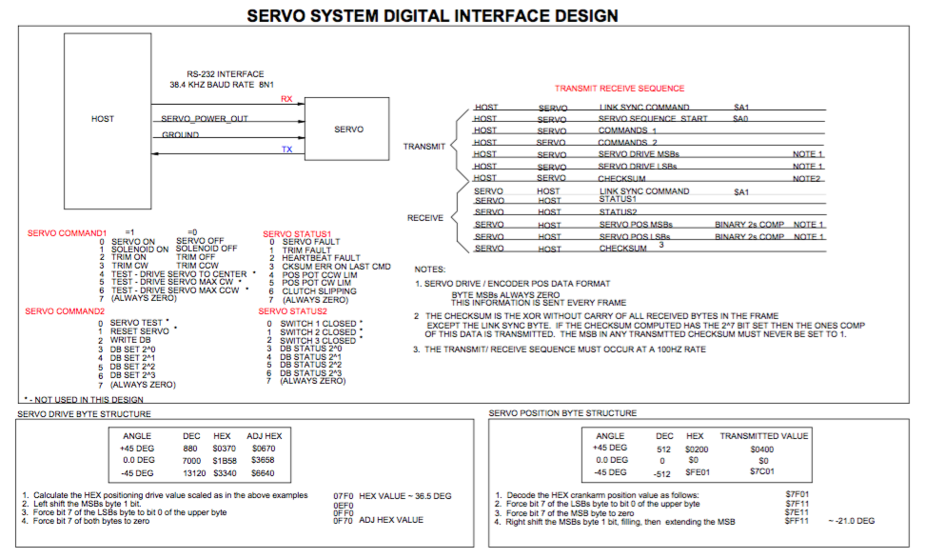
What is the protocol?
If the interface is RS232 then presumably there will be a packet definition whereby you send it a value which represents the desired speed and direction. On the KFC225 servos (KS27xC) a control voltage -9V to +9V gives you full rpm one way to full rpm the other way, and a digitally controlled servo won’t be any different – assuming it has internal tacho feedback (or uses some equivalent means of ensuring a linear and load-independent transfer function e.g. by using a stepping motor) which it would be really dumb to not have.
The RS232 interface will be running at some baud rate etc e.g. 9600,8,N,1 although for a servo you would probably run it a whole lot faster, with 115200 being a typical “top end” value. Latency in a control loop is a really bad thing.
This stuff is fun  I do protocol converters and A-D/D-A in my business.
I do protocol converters and A-D/D-A in my business.
What are you using for the AHRS, @Przemek? Everybody selling these homebuilt systems is buying in an off the shelf module.
Hi. I know generally RS_232 and programming. Problem is that description of trio protocol is poor, no examples etc. It’s hard to make experiments because one mistake for example in checksum makes that servo is not working.
I’m building it on Arduino mega and razor ahrs + gps receiver.
Now I can controll servo by PWM but it’s not accurate and I cant reach full range. By serial would be perfect.
Hmmm… you just need to play with it. Looks like it is all there, sort of…
I know but I have no feedback what is wrong. It’s just not working. I was playing 2 days to make PWM. It’s 100hz.
Maybe someone was building something like that or have possibility to make data dump from RS-232 communication of original autopilot. It makes work much easier, now It’s blind looking.

Ahh, not this photo :)

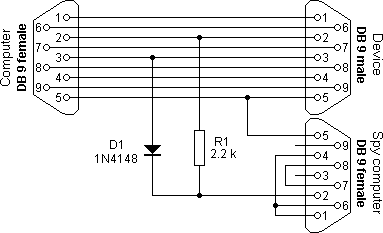
I would set up a data capture program on a laptop e.g. I think Teraterm can do this, and capture some packets.
RS232 can have multiple loads so tapping into the data line (I assume it is unidirectional) will work.
Simple rs-232 sniffer is enough
https://www.lammertbies.nl/picture/en_db9_monitor.png
I was connecting parallel sniffing laptop.
It’s 38400 kbps 8N1
RS-232 level single ended or TTL compatible;
Thanks for the serial protocol.
Just to add more info about Trio PWM, as per the info I have available:
Repetition rate of PWM pulses is 100Hz
The pulse width 1.5ms centeres the servo.
Pulse widths from 1.2 to 1.8ms move the servo +/- 45 Degrees.
Trio states that the PWM input expects RS232 voltage levels, but it shall also accept TTL. I am not sure if they really mean less than -3 V for pulse and more than +3V for zero, that is yet to be found out. With also accepting TTL it could mean something like zero being above +3V, pulse is 0V.


{kind=link}