
The old KG102A gyro will restart though obviously if you interrupt the power when flying a coordinated turn, for long enough for it to spin down, it cannot possibly know how to erect... and when you return to level flight it will indicate a roll.
Obviously? Did you try it?
I haven't but I cannot imagine this to be a problem.
The gyro is also incredibly stable. If I put it at say a 10 deg roll and leave it for an hour, it still shows the same. This however may simply be confirming that they are using some kind of level sensing, and feeding that in as an auto erection mechanism.
There must be some auto erection mechanism. Given the double integration going on, it would never be stable enough for anything but a traffic circuit if there wasn't some erection mechanism.
Normally, to provide auto erection, one needs either airdata (constant altitude plus constant heading is assumed to be straight and level flight) or GPS data (constant GPS altitude plus constant GPS track is assumed to be straight and level flight). Aspen do the former, AFAIK, while Garmin use the latter. The SG102 does has neither input which is probably why the system is not certified as a primary horizon.
Huh? My mechanical gyros don't have neither GPS nor airdata. Why should they? Yet they automatically erect, and are certified as primary horizon.
So why can't you do the same as the mechanical gyro electronically and certify that as primary horizon?
My own solid state attitude indicator software (not certified, of course) happily erects the "gyro" from the acceleration vector and the magnetic field vector. Of course it will indicate wrongly if started up in accelerated flight, just as the mechanical gyro, but once you're in level flight (or rather unaccelerated flight), that corrects itself relatively quickly. (And there's a "Quick Erect" software button, just like the mechanical gyro).
Obviously? Did you try it?
I haven't but I cannot imagine this to be a problem.
No, but basic physics tells me that a gyro like that cannot know which way is "up".
The KG102A will self erect, using gravity, but in a coordinated turn there is no way to know.
There is actually a way to determine "up" but it requires a far more accurate gyro. I understand that the fibre optic gyros can, after some minutes, work out where the true north is, and from that (given GPS position) one could erect the gyro straight up (90 deg to the earth's surface). I heard from one old pilot that the old mechanical gyros in the original 747 could also do that but it took about half an hour.
There must be some auto erection mechanism. Given the double integration going on, it would never be stable enough for anything but a traffic circuit if there wasn't some erection mechanism.
Yes I think you must be right.
Huh? My mechanical gyros don't have neither GPS nor airdata. Why should they? Yet they automatically erect, and are certified as primary horizon.
Yeah, the old mechanical gyros self erect using pendulous vanes (in the vac ones) or using either reed switches with little weights on them, or pendulous vanes working off the airflow coming off the motor on the electric ones. But AHRS gyros don't have that.
I know there is no fundamental difference between background-erecting say a KI256 using pendulous vanes, and background-erecting an AHRS gyro (a pure 3-axis accelerometer) using a level sensor, but I guess the certification authorities have taken a different view on the AHRS products.
My own solid state attitude indicator software (not certified, of course) happily erects the "gyro" from the acceleration vector and the magnetic field vector. Of course it will indicate wrongly if started up in accelerated flight, just as the mechanical gyro, but once you're in level flight (or rather unaccelerated flight), that corrects itself relatively quickly. (And there's a "Quick Erect" software button, just like the mechanical gyro).
Which one is it?
But solid state AHRS typically have a 3D acceleration sensor, which is even better than the mercury switches...
Which one is it?
http://svn.gna.org/viewcvs/vfrnav/trunk/flightdeck/ahrs.cc?view=markup
It uses Mahony's SO(3) group quaternion stuff. See for example "Non-linear complementary filters on the special orthogonal group", Robert Mahony, Tarek Hamel, and Jean-Michel Pflimlin, "IEEE Transactions on Automatic Control 53, 5 (2008) 1203-1217"
But solid state AHRS typically have a 3D acceleration sensor, which is even better than the mercury switches...
I may be getting confused but measuring acceleration is nothing to do with sensing "up" in a stationary frame (i.e. measuring the gravity vector). An AHRS gyro alone cannot tell which way it is oriented if you just power it up. There has to be some other input, to produce an "AI".
On the Iphone etc apps they don't bother with erection and get you to press a button when you are straight and level, and then it's OK for a minute or two

I don't actually know what the Iphone/Ipad has, but there ought to be enough in there to produce an auto erecting AI, so why these apps don't bother is a mystery. They could just run a slow background process, emulating the pendulous vanes in a vac AI. This is so obvious that anybody would think of it.
That source code you linked to is baffling. I am just an old Z80/H8/80x86/8051/etc assembler/C programmer... 
I may be getting confused but measuring acceleration is nothing to do with sensing "up" in a stationary frame (i.e. measuring the gravity vector). An AHRS gyro alone cannot tell which way it is oriented if you just power it up. There has to be some other input, to produce an "AI".
Well, you have to tell it how it is mounted on the aircraft. Same with mechanical gyro's, there are different gyros for different panel tilts.
Presumably that's why you have to press the ipad button...
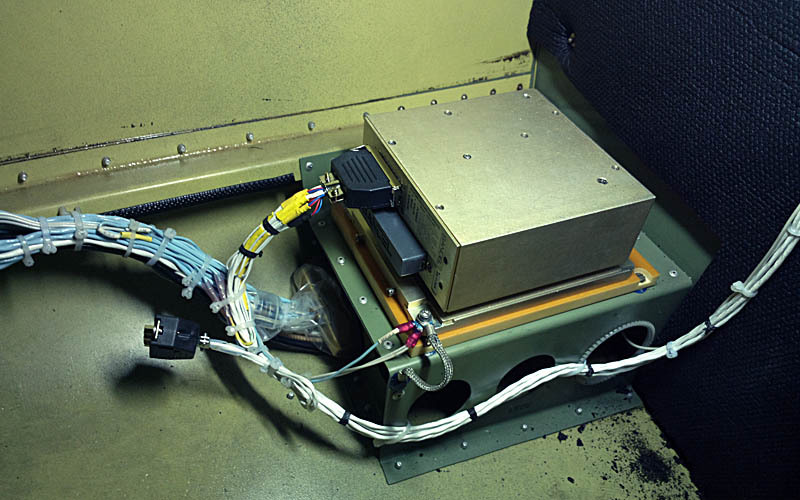
The SG102 is in... mounted on the old KG102A platform which turned out to already be level in both pitch and roll
This shows the two modes of the SN3500 EHSI

The mode selection is just a toggle switch which connects one wire to ground.
It's a pity the pitch/roll output (30Hz ARINC429 digital) from the SG102 cannot be used to drive the KFC225 autopilot, replacing the KI256 vacuum horizon (the one above the EHSI) which is often troublesome (IMHO due to incompetent build and subsequent overhauls). A suitable converter would convert the ARINC429 data into an emulation of an LVDT, which would be a nice little electronics project...
I would bet that the GAD43 (Garmin) or EA100 (Aspen) boxes which do the KI256 emulation do in fact take ARINC429 pitch/roll input, so all this has been done before.
A video in flight
I know the switch is supposed to be labelled but the man with the labelling machine went on holiday, so I am making up some tonight...
Does anyone have a used Sandel SG-102 / SG102 AHRS?
Mine has just packed up. It is the -200 ruggedised version but I don’t need it ruggedised.
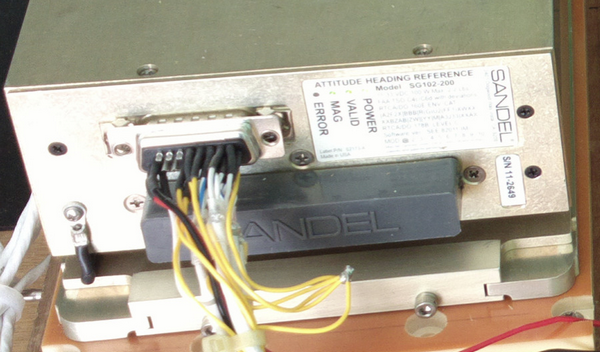
I can get one from the USA but if there is one in Europe, especially an unwanted one sitting at some avionics shop, that would be better.
I think we have a new surplus one (about 5 years old). I’ll check tomorrow and PM you.
Great; thanks. I am now told a -000 would also do. Basically it needs to have both connectors, and both ARINC429 attitude and X/Y/400Hz heading outputs.


