
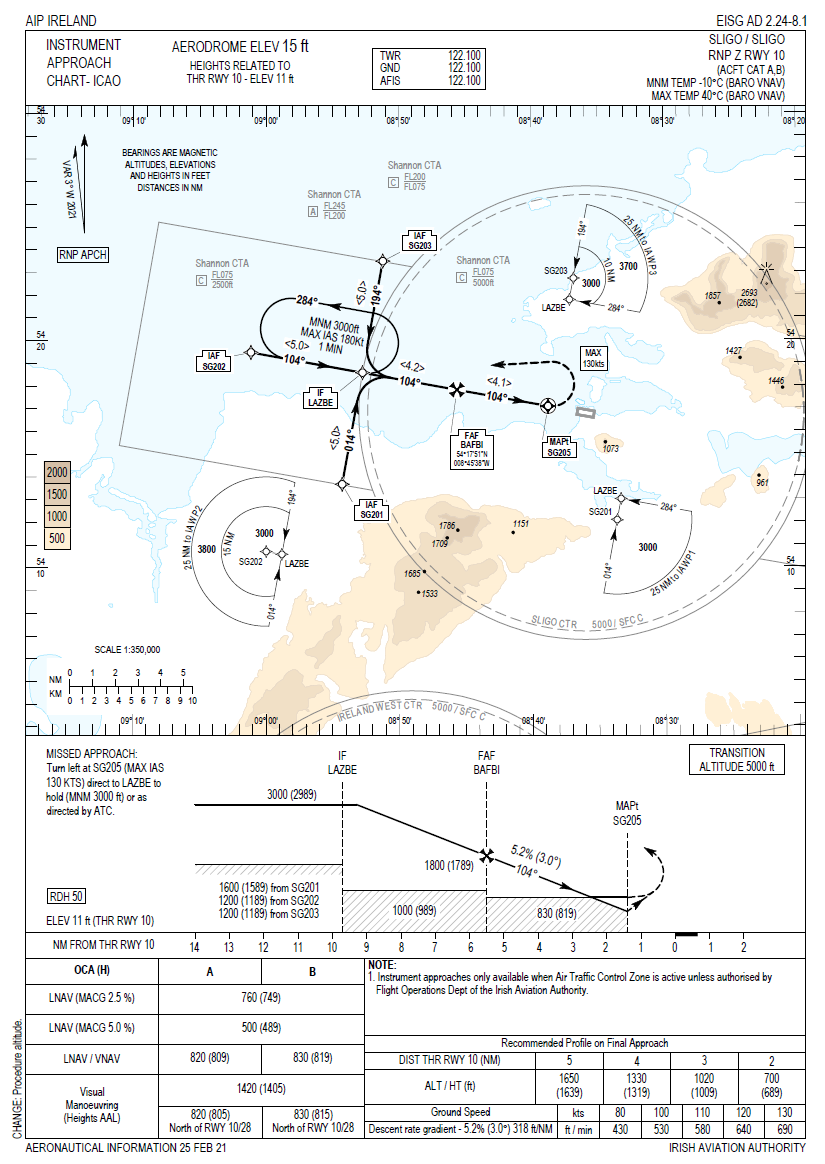
I was recently looking at an AIP approach plate for EISG and noticed that the RNP Z RWY 10 has OCA’s as follows:

Any thoughts as to why/how the LNAV OCA is so much lower (for both climb gradients) than the LNAV/VNAV? It’s not something I have seen before.
It’s surprising but looks to me like those LNAV/VNAV straight-in minima are exactly floored to those for MVL for circling north of the runway? do you have the full Jepps plate?
The other “obvious reason” is LNAV has step down altuitudes while LNAV/VNAV may cut through terrain on shallow 3deg path, so in some sense LNAV/VNAV is more contrained in design as it’s using a precise single glide path than an equivalent LNAV with few altitude floors…
Obviously allowing for vertical sharp dives on LNAV step altitudes may give you better minima than LNAV/VNAV but it’s of no use if you are using CDFA 
Also, depending how step altitudes are set (length & delta), the low LNAV minima could be just theoritical: it’s like flying level at MSA then pushing nose 90deg down to to TCH at MAPt and avoid some cliffs, that design may give MDH=300ft on LNAV but will give you DH = MSA = 2000ft on LNAV/VNAV and 3deg, maybe someone need to run the calculations for St Barth RNP (anyone has the plates for it?  )
)
Aside from APV circling floors & NPA step-down floors, LNAV/VNAV should naturally have lower OCH than LNAV
Some preliminary research pointed towards the difference between a three degree path for lnav/vnav compared to a steeper possible descent for lnav, however see the full AIP plate below, where you will see the final approach is entirely over water, so I am not sure that can be it.
Here is a better explanation with a graph, you are right, it seems you don’t even need the step downs (the plate don’t have that many anyway)
https://www.ifr-magazine.com/technique/obstacle-clearance/
I think it boils down to why obstacle clearance surface (OCS) on LNAV/VNAV is funky & kinked OCS with hybrid of flat & slope? it’s not flat OCS like LNAV? or pure slope OCS like LPV/ILS? it could be the Baro-VNAV stuff and temps margins going into those LNAV/VNAV? @NCYankee may have better anwsers to that
I would be puzzled to death if LOC has better miniman than ILS? or LNAV better minima than LPV?
Slope OCS will be less than flat OCS, especially, as the latter has both primary & secondary areas
Unless there is an intermediate step down for obstacle clearance, aren’t all non precision in EASA CDFA?
Doesn’t answer the OP question, but I don’t think a ‘dive and drive’ is the explanation.
The Jepp chart shows the LNAV as being CDFA and there is only one altitude floor inside the FAF, so there are no step-down altitudes at play here. And the Jepp chart only shows a single 3.00° descent from the FAF at BAFBI to SG205.
Normally, the difference is related to the impact of an obstacle protruding through the Obstacle Clearance Surface (OCS). An MDA just needs to have 200/250 feet clearance over the obstacle, whereas a DA is displaced based upon the glide path angle and obstacle location. As mentioned, this approach is over water so that would seem unlikely unless there is some sort of fixed protrudent rising out of the water, although there is nothing charted. It looks like the approach path is far enough away from the parallel coastline for an obstacle there to be a factor either, and here again there is nothing charted.
Normally, the assumed minimum MACG if not specified would be 2.5%. Given that the LNAV minimums differ based on MACG of 2.5% or 5.0%, one could speculate however that higher DA for LNAV/VNAV is somehow related to the MACG. It just doesn’t make sense though since the LNAV/VNAV DA point is close to 2.5nm from the threshold compared to the 1.4nm from SG205.
This is totally common in the US. The obstacle clearance surface for the LNAV/VNAV is a sloped surface and when obstacles are encountered close in to the runway on the sloped surface, the obstacle height is projected backwards from the runway until it hits the sloped obstacle surface and the DA/H is established above this point. So it has the effect of moving the DA further back and away from the runway at a higher altitude so that the obstacle ends up being in the visual segment so the pilot can see it and avoid it. Also, with a vertically guided procedure, on reaching the DA, the aircraft is in a descent and will descend below the DA as a matter of physics and momentum. On the missed approach pull up, the obstacles in the missed approach can cause the DA to be increased so the aircraft will clear them. On an LNAV procedure, there is no descent below the MDA allowed and the aircraft is assumed to be in level flight at the missed approach point. Also the obstacle surface is a level surface at a fixed height above the controlling obstacle. Also, in some cases, step down fixes may be used for an LNAV procedure so that once the obstacle is cleared, the aircraft on the LNAV may allow descent to a lower MDA. This step down option is not available to a vertically guided procedure.
Ibra wrote:
I would be puzzled to death if LOC has better minimun than ILS? or LNAV better minima than LPV?
They exist. In the US, there are a few cases where the LPV is higher than the LNAV/VNAV, a few cases where the LPV is higher than the LNAV and a bunch of cases where the LNAV/VNAV is above the LNAV. This all has to do with the fact that the LNAV, LNAV/VNAV, and LPV use different surfaces and some obstacles affect the DA/MDA more than others.
Thanks NZYankee, interesting.
I thought it might have something to do with MAPCG?
@NCYankee “a few cases where the LPV is higher than the LNAV”
If no obstacles penetrating LPV visual segment then that has to do with the airport sitting on some concave surface, behind a mountain wall or deep inside some 500ft cave
In summary, it’s caused by very small obstacles that penetrates APV slopes near the small kink and blow up the DH, this is a very well known problem in numerical analysis: too much precision when things are not smooth is bad, so maybe worth smoothing those kinked OCS surfaces with low partial derivatives in space, a smooth surface may keep monotonic minima




