
Another question that arises, but might be better in a new thread, is how exactly the a/p is connected to the GP.
Is it the same as roll (where the primary input is from AoB (or rate) and secondary from heading bug or HSI), so the primary is from pitch and the secondary from GP, or does the GP provide a primary input?
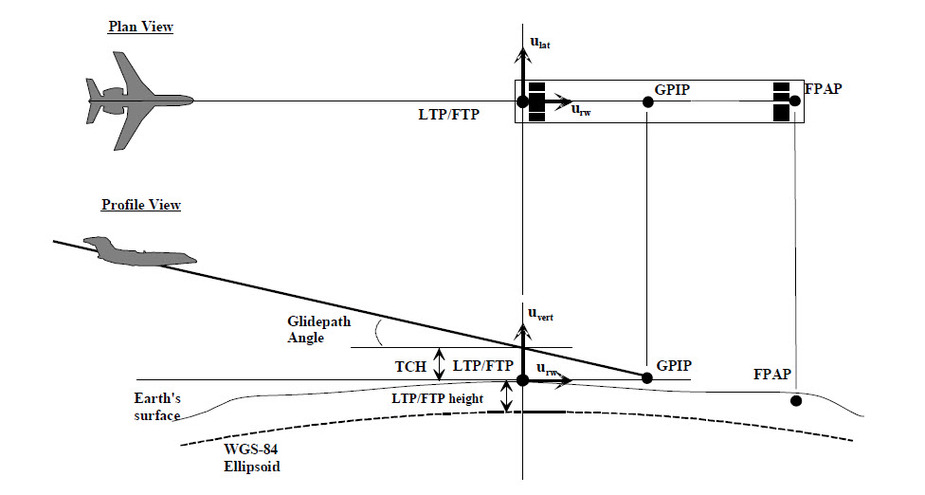
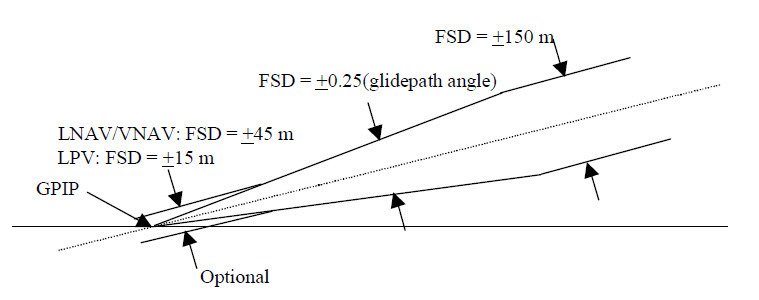
The LPV vertical guidance continues down to the GPIP, which is the point where the GP intercepts the plane of the runway elevation at the threshold. Then the guidance is flagged/ removed after passing the GPIP. There is no level off, but it is optional for the designer to use a linear vertical deviation for the last part of the GP. The GTN/GNS devices use the linear full scale deviation (FSD) close in to the GPIP where it stays at +/-15 M for LPV and +/- 45 meters for LNAV/VNAV. When far out on the final approach course, the FSD is capped at +/- 150 meters. This was necessary to enable using WAAS based vertical as an alternative to Baro/VNAV for LNAV/VNAV procedures. The GP in between the two fixed FSD values is angular and +/- 0.25 times the GP angle.
So, if there is no level off, why does it happen on the sim, do we think?
I just simulated an LPV using my GTN trainer and it continued descending until about 670 feet (hard to spot the precise lowest value), and then immediately started climbing, there was no level segment observed. Runway threshold elevation is 667 feet.I activated the approach RNAV 2, at my airport, KUZA. I simulated at 60 knots so I could see altitude changes more precisely. So as far as I can tell, the Trainer did a touch and go.
I originally simulated the approach using the initial altitude of 2500 feet, which is the crossing height of the GP at the FAF AZAKA. I think that the subsequent bounce off the runway was climbing back to 2500 feet, so I changed the simulator altitude setting to 667 after the trainer crossed the FAF. I want to see if the trainer will slide along the runway. This time it continued to descend to 665 and then climbed to 667 feet.
So, I think that bottom line, if you fly the LPV on the autopilot. it will hit the ground at the GPIP or very nearby and vertical guidance will cease passing the GPIP location. Depending on actual geometry of the runway surface, you may or may not touch down before the wheels stop further descent. The autopilot would only get you in the vicinity of the ground and would not react to small changes in vertical deviation. Also I would want to know the behavior of the autopilot when vertical guidance ceases. Certainly momentum has something to say about this as well. I would also note that both the baro altimeter and GPS altitude are not going to be accurate to more than 20 or 30 feet, sometimes worse, so if it was really zero zero, i would want to track laterally and continue descent without a flare. My Bonanza, without flaps extended and approaching at 80 Kts would be nose up and I believe that gear could take a descent rate of 424 feet/minute.
Interesting thread from a helicopter point of view. We often go offshore and return without an alternate if the weather meets the criteria laid down in Part-HOFO. Sometimes, but very rarely, the 100kt fog can appear during a long sector back. If you haven’t used your superior judgement and taken fuel (may not be available) then you you could find yourself arriving back at the field with little alternative but to go below system minima. I haven’t seen this happen for real but we do practice this on Sim LOFT scenarios. Our aircraft when 4 axis coupled will fly all the way down to 80’ and then level off on the ILS. I have tried this in the Sim and when VMC and it seems to work. We decelerate using the hover mode function and can then possibly descend vertically using the radalt alt hold down to 0’. I’m not sure of the science behind this below 200’ and it could just be following the localiser with a preset ROD.
Would you do it unless you absolutely had to – no. Without references it is bloody scary.
@NCYankee that behaviour is definitely different on a full sim (XP-11 with Reality XP GTN, which is the Garmin Trainer.)
It rounds out higher (difficult to tell exactly, but 10-20’) flies along the runway and climbs away. I haven’t measured how long the period of flat is, but I think it is around 1km, so beyond the end of short runways.
I will try to video it, but it’s difficult to capture both the GTN and the outside view.
I have spent a frustrating morning trying to video this behaviour.
In LPV, it just flew at about 10’ above the ground and eventually hit a “grassy knoll” in the middle of Calais (it doesn’t crash for houses, it flies through them, it only crashes into terrain.)
So I thought I would try again using the Visual Approach, as I did a lot of experimenting on that when it first came out, and thought I might have got confused, but the behaviour was exactly the same (same terrain; I must apologise to all the good burghers of Calais, whose breakfast I disturbed by flying through their kitchens.)
So, I have to say that the climbing away has gone. There is no doubt that it was there about three months ago, when I repeated it ad nauseam because it seemed so strange, but now not.
There has been a change in GTN software in the meantime (6.41 – 6.50), and they have done a lot of work in vertical navigation, so maybe they have rewritten or corrected that bit, who knows?
But the good news is that we all seem now to be on the same page. It flies super accurately to ~10’ above the GPIP, then levels off and flies along the centreline to the end of the runway.
So, in absolute extremis, with zero visibility (more likely to be medical or oil from the engine than fog or ice) and no-one on the ground to give directions, I guess it might work, but, as others have said, in any modern fog you would be able to see the centreline lights from about 50’ and land, or at the very least use sideways vision.
(I am just old enough to remember the last of the London Pea Soupers, where you literally couldn’t see the road from the pavement, but that hasn’t happened for 60 years, as far as I know.)
Timothy wrote:
(I am just old enough to remember the last of the London Pea Soupers, where you literally couldn’t see the road from the pavement, but that hasn’t happened for 60 years, as far as I know.)
Brings back memories of trying to walk the three miles to school
What an interesting thread.
It would be very hard to simulate the whole GPS – autopilot – aircraft system. Garmin (or Avidyne) own the software for, potentially, the first two, but I would be amazed if anybody out there has built mathematical models for GA aircraft.
Many years ago I discussed this with a full motion sim computing guy (back in the days when GEC were building computers and real programmers used assembler and Fortran… nowadays real programmers use assembler and C of course 
 ) and all the full motion sims wee running a set of partial differential equations which were built for every aircraft to be simulated. With lots of special cases e.g. when the flaps, wheels, spoilers etc are extended, and then rather more so when everything falls apart when the wheels touch the ground Eventually, by say 1965 (when decent computers existed) this process was well developed, and e.g. when the Concorde first flew, the test pilot reported that it flew just like the sim. Same with Apollo, of course, which had way more resources thrown at the simulation side.
) and all the full motion sims wee running a set of partial differential equations which were built for every aircraft to be simulated. With lots of special cases e.g. when the flaps, wheels, spoilers etc are extended, and then rather more so when everything falls apart when the wheels touch the ground Eventually, by say 1965 (when decent computers existed) this process was well developed, and e.g. when the Concorde first flew, the test pilot reported that it flew just like the sim. Same with Apollo, of course, which had way more resources thrown at the simulation side.
Ideally, GA autopilots should have their control loop parameters developed using such models but, hey, this is GA, which is why so many “certified” autopilot installations are unstable under some loading / speed conditions. Especially STEC whose STCs were mostly obtained on the back of others which in turn were never fully flight tested, back in the goode olde days when you could do that. King did it a lot better… How well Garmin and the (much less funded) Avidyne have done it with their current autopilot products, I don’t know, but they have so few STCs that they may have done it right (actually flight tested it properly).



