
Presumably not 
Has there been any relevant change in any of the above issues?
The Aspen has the same issue: The problem is that the MEMS gyros (like all gyros) tend to wander.
Yes. That’s why every attitude algorithm I’ve seen so far uses a 3D linear accelerometer to measure the g vector to estimate and correct for the gyro bias. It works much like the vanes in a pneumatic “classic” AI, except it’s implemented completely differently.
Newer systems (G500/G600 at least) use air data for this: if airspeed, magnetic heading and altitude are constant, then the system assumes you are in level flight and adjusts itself. Older systems use the GPS: if GPS track, GS and altitude are constant, then adjust for level flight.
That cannot be. If this was the case, and you happened to be inside a convective cloud where airspeed fluctuates and the altitude cannot be held very constantly, you’d loose attitude information within minutes.
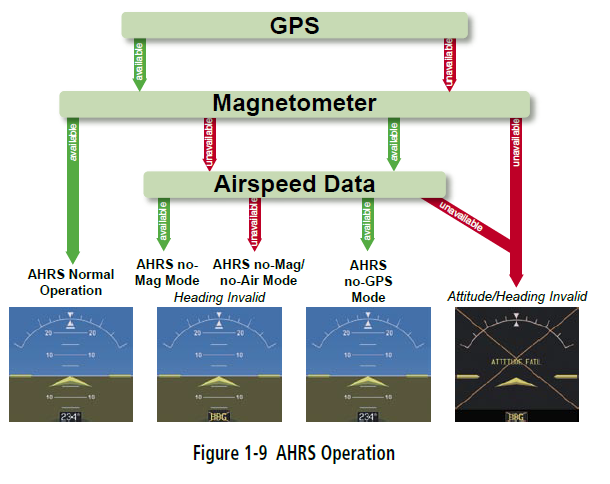
This picture depicts the degradation of AHRS functionality quite nicely:
Thanks guys. The aircraft has undergone major maintenance (engine upgrade) and there seem to be some G1000 issues introduced after the work done.
We got GPS integrity errors during flight, followed by an attitude failure.
My assumption that the attitude failure was a result of the GPS integrity error seem to be incorrect.
We’re also suffering from PFD/MFD panel shutdown during engine startup, which might be related.
Aircraft will go back to the maintenance shop. Will keep you updated.
There might be something else wrong.
The G1000 takes 2x GPS and Air Data. Without one or both GPS signals available, it should give a warning as the total system integrity is lower. It should not result in loss of attitude and heading information.
Loss of one or both GPS and the G1000 should indicate a warning, but still operate though the system integrity is lower.
Loss of air data to AHRS and the system should operate normally (as long as GPS signals are received)
Loss of both GPS signals AND loss of air data to AHRS will make attitude and heading invalid and could generate the error as described,
Loss of the magneto meter will only cause loose of heading.
My only experience with the G1000 is with a club C172.
However, the pilot’s guide for that says that it still provides attitude and heading information without GPS, provided it is receiving valid magnetometer and air data.
On page 16 here: http://static.garmincdn.com/pumac/190-00498-07_0A_Web.pdf
Actually I thought Aspen used airdata
I checked the pilots guide – you’re right.
This came up before
Actually I thought Aspen used airdata while Garmin (G500) used GPS, for the “background erection” process which a old-style gyro AI does with the pendulous vanes.
Maybe the G1000 does use airdata. Or maybe it’s a different context.
The Aspen has the same issue: The problem is that the MEMS gyros (like all gyros) tend to wander. Older MEMS gyros aren’t particularly accurate, so they need something to tell them when they are in level flight.
Newer systems (G500/G600 at least) use air data for this: if airspeed, magnetic heading and altitude are constant, then the system assumes you are in level flight and adjusts itself. Older systems use the GPS: if GPS track, GS and altitude are constant, then adjust for level flight.
TBH, I’m not completely comfortable with this. Recently I’ve been practicing ILS approaches with the Aspen blocked off – it’s quite difficult to hold an accurate ILS without a DGI (I have a TC, compass, vacuum AI and CDI as backup).



